




















1. Bevezetés az AC meghajtókba (változtatható frekvenciájú meghajtók) A modern ipari irányítás területén egy......
OLVASS TOVÁBB
Otthon / Hírek / Ipari hírek / AC szervomotor magyarázata: hogyan működik, típusai és hogyan válasszuk ki a megfelelőt
AC szervomotor magyarázata: hogyan működik, típusai és hogyan válasszuk ki a megfelelőt
Mi az AC szervomotor?
A váltakozó áramú szervomotor egy olyan típusú villanymotor, amely váltakozó árammal működik, és a helyzet, a sebesség és a nyomaték pontos szabályozására szolgál. Ellentétben a hagyományos váltakozó áramú motorokkal, amelyek csak rögzített sebességgel forognak, a szervomotor folyamatosan visszajelzést kap a tengelyére erősített jeladótól. Ez a visszacsatolás pontosan megmondja a rendszernek, hogy az adott pillanatban hol van a motor, így valós idejű korrekciókat hajthat végre, és nagy pontossággal megtarthatja célpozícióját.
A „servo” szó a rabszolga latin szóból származik – és lényegében ezt teszi. Hűen követi a vezérlőtől érkező parancsokat, és folyamatosan beállítja magát a kívánt pozícióhoz, fordulatszámhoz vagy nyomatékhoz. Ez teszi az AC szervomotorokat a modern automatizálás, a CNC-gépek, a robotika és minden olyan alkalmazás gerincévé, ahol a precíziós mozgás számít.
Az AC szervomotort az egyenáramú szervomotortól az áramforrás és a felépítés választja el. Az AC szervomotorok általában tartósabbak, kevesebb karbantartást igényelnek (nincs kefe csere), és jobban megfelelnek a nagy sebességű, nagy teljesítményű ipari környezeteknek. Szinte mindig egy szervohajtással (szervoerősítőnek is nevezik) és egy mozgásvezérlővel együtt használják őket, hogy egy teljes zárt hurkú szervorendszert alkossanak.
Hogyan működik az AC szervomotor
Az AC szervomotorok alapelve a zárt hurkú visszacsatoló vezérlés. Íme egy egyszerű részlet a rendszer működéséről az elejétől a végéig:
- Parancs bemenet: A mozgásvezérlő (PLC, CNC vezérlő vagy PC) célértéket küld – például „forgatni 90 fokkal” vagy „forgatni 3000 RPM-en” – a szervohajtásnak.
- Szervo meghajtó kimenet: A szervohajtás a parancsot precízen szabályozott váltakozó feszültséggé és áramerősséggé alakítja, amely a motorhoz kerül.
- Motor mozgása: A motor forgórésze az állórész tekercselése által létrehozott elektromágneses tér hatására mozog.
- Visszajelzés a kódolóról: A motor tengelyére szerelt forgójeladó folyamatosan méri az aktuális helyzetet és fordulatszámot, és visszaküldi ezeket az adatokat a szervohajtásnak.
- Hibajavítás: A hajtás összehasonlítja a tényleges pozíciót a parancsolt pozícióval, és azonnal beállítja a kimenetet, hogy kiküszöbölje az esetleges eltéréseket (ezt "hibának" nevezik).
Ez a hurok több száz vagy több ezer alkalommal fut másodpercenként, ezért a szervorendszerek ilyen szűk tűréseket tudnak elérni. A kódoló kritikus alkatrész – a legtöbb modern AC szervomotor nagy felbontású kódolókat használ 17 vagy 23 bites felbontással, ami azt jelenti, hogy fordulatonként több millió különböző pozíciót képesek érzékelni.
AC szervomotorok típusai
Az iparban manapság két fő váltóáramú szervomotor-típust használnak, amelyek mindegyike eltérő működési elvekkel és ideális felhasználási esetekkel rendelkezik.
Szinkron váltakozó áramú szervomotor (PMSM)
A szinkron AC szervo motor Permanent Magnet Synchronous Motor (PMSM) néven is ismert – a rotorba ágyazott állandó mágneseket használ. A forgórész pontosan szinkronban forog az állórészben lévő forgó mágneses mezővel. Mivel a mágnesek mindig bekapcsolva vannak, az ilyen típusú motorok még alacsony fordulatszámon is nagy nyomatékot produkálnak, és kiváló dinamikus reakcióval rendelkeznek.
A szinkron szervomotorok messze a legelterjedtebb típusok az ipari automatizálásban és a CNC alkalmazásokban. Kompaktak, hatékonyak és széles fordulatszám-tartományban képesek fenntartani a névleges nyomatékot. Az olyan márkák, mint a Mitsubishi, a Fanuc, a Yaskawa és a Siemens, mind szinkron szervomotorokat kínálnak elsődleges termékcsaládként.
Indukciós váltóáramú szervomotor (aszinkron)
Az indukciós szervomotor mókuskalitkás forgórészt használ, ahol az áramot a forgó mágneses tér indukálja – nincsenek állandó mágnesek. A forgórész mindig kissé lemarad az állórész mezőjétől (ezt "csúszásnak" nevezik), így keletkezik a nyomaték. A vektorvezérlésű szervohajtással párosítva az aszinkron motorok is jó sebesség- és nyomatékszabályozást érhetnek el, bár általában nem olyan precízek vagy érzékenyek, mint a szinkron típusok.
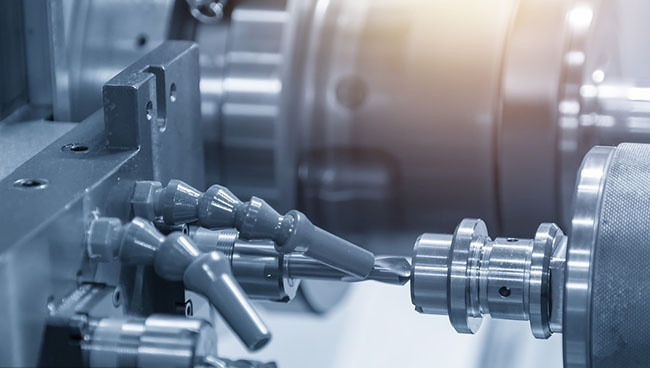
Az indukciós szervomotorokat gyakran választják nagy teljesítményű orsóalkalmazásokhoz, például CNC marógépek orsóihoz, ahol a nagyon nagy sebesség és a robusztusság többet jelent, mint az ultraprecíz pozicionálás. Nagyobb teljesítmény mellett olcsóbbak is.
Főbb jellemzők, amelyeket meg kell értenie
Mielőtt bármilyen AC szervomotort választana vagy azzal dolgozna, meg kell értenie az adatlapon szereplő alapvető specifikációkat. Íme a legfontosabb paraméterek egyszerű nyelvű lebontása:
| Specifikáció | Mit jelent | Miért számít |
| Névleges nyomaték (N·m) | Folyamatos nyomaték, amelyet a motor névleges fordulatszámon tud produkálni | Meg kell haladnia a terhelési nyomatékot, beleértve a súrlódást és a tehetetlenséget |
| Csúcsnyomaték (N·m) | Maximális nyomaték rövid sorozatokhoz (általában 2–3-szoros névleges érték) | Gyorsítási és lassítási fázisokhoz szükséges |
| Névleges sebesség (RPM) | A normál üzemi fordulatszám névleges nyomaték mellett | Meghatározza, hogy a motor megfelel-e az Ön mozgásprofiljának |
| Névleges teljesítmény (W vagy kW) | Kimeneti mechanikus teljesítmény (nyomaték × fordulatszám) | A meghajtóhoz és a kábelek/megszakítók méretéhez igazítják |
| Kódoló felbontás | Az impulzusok vagy bitek száma fordulatonként | Nagyobb felbontás = finomabb helyzetszabályozás |
| Rotor tehetetlensége (kg · cm²) | A forgórész ellenállása a fordulatszám változásaival szemben | A stabil vezérlés érdekében a terhelés tehetetlenségéhez kell igazítani |
| IP minősítés | Védettségi szint a por és víz behatolása ellen | Kritikus zord vagy nedves környezetben |
AC szervomotor vs léptetőmotor: melyiket használja?
A mozgásvezérlésben az egyik leggyakoribb kérdés, hogy AC szervomotort vagy léptetőmotort használjunk. Mindkettő szabályozhatja a pozíciót, de nagyon eltérően működnek, és különböző alkalmazásokhoz illeszkednek.
A léptetőmotor rögzített lépésekben (lépésekben) mozog, és nyitott hurkú – ami azt jelenti, hogy a legtöbb alapvető beállításnál nincs jeladó visszajelzés. Egyszerű, olcsó, és jól működik kis terheléseknél mérsékelt sebesség mellett. A léptetők azonban túlterhelési körülmények között minden önkorrekció nélkül kihagyhatnak lépéseket, és nagyobb fordulatszámon jelentős nyomatékot veszítenek.
Ezzel szemben az AC szervomotor a kódolónak köszönhetően mindig pontosan tudja, hol van. Terhelés alatt sem veszíti el pozícióját, gyorsabban reagál a parancsokra, és széles fordulatszám-tartományban megtartja a teljes nyomatékot. A kompromisszum a költség és az összetettség – egy szervorendszer (motor-meghajtó kábelek hangolása) lényegesen többe kerül, mint egy azonos méretű léptetőrendszer.
Íme egy egyszerű ökölszabály: használjon léptetőt az egyszerű, alacsony terhelésű, kis sebességű pozicionáláshoz, ahol a költség kritikus. Használjon váltakozó áramú szervomotort, ha nagy sebességre, nagy nyomatékra, dinamikus terhelésváltozásokra van szüksége, vagy ha a pozíció pontossága nem alku tárgya.

Az AC szervomotorok általános alkalmazásai
Az AC szervomotorok szinte minden iparágban megjelennek, ahol szabályozott mozgásra van szükség. A leggyakoribb alkalmazások a következők:
- CNC megmunkáló központok: Szervomotorok hajtják meg a marógépek és esztergagépek X, Y és Z tengelyét, valamint egyes konfigurációkban az orsót. Lehetővé teszik, hogy a gép bonyolult formákat mikronnyi pontossággal vágjon.
- Ipari robotok: A 6 tengelyes robotkar minden ízületét jellemzően saját szervomotorja hajtja meg. Az összes ízület összehangolt vezérlése folyékony, precíz mozgást tesz lehetővé összetett pályákon.
- Csomagológépek: A szervomotorok vezérlik az indexelési, vágási, tömítési és töltési műveleteket a nagy sebességű csomagolósorokon, ahol az ismételhetőség és a sebesség elengedhetetlen.
- Félvezető gyártás: Az ostyakezelés, a pick-and-place rendszerek és az ellenőrző berendezések szervomotorokra támaszkodnak a nanométer szintű pozicionálás megismételhetősége érdekében.
- Nyomtatás és átalakítás: A nyomógépek regisztervezérlése és a szalagkezelő rendszerekben a feszítésszabályozás a szervomotorokon múlik az egyenletes anyagadagolás fenntartása érdekében.
- Orvosi felszerelés: A CT-szkennerek, sebészeti robotok és infúziós pumpák kicsi, precíz szervomotorokat használnak a biztonságos és pontos működés érdekében.
Hogyan válasszuk ki a megfelelő AC szervomotort
A megfelelő váltóáramú szervomotor kiválasztása a motor képességeinek gondosan az alkalmazás igényeihez való igazításán múlik. Ennek a lépésnek a siettetése vagy alulteljesítményű rendszerhez vezet, amely meghibásodik a területen, vagy túlméretezett, túlárazott megoldáshoz. Kövesse az alábbi lépéseket:
1. lépés – Határozza meg terhelési követelményeit
Kezdje a terhelési nyomaték kiszámításával, amely magában foglalja a mozgatandó erőt vagy súlyt, a súrlódást és az esetleges mechanikai erőátvitelt (hajtómű, szíj, golyóscsavar). Számítsa ki a terhelés tehetetlenségét is – ez megmutatja, mennyi energiát kell a motornak biztosítania a terhelés felgyorsításához. Az általános iparági irányelv szerint a terhelés/motor tehetetlenségi hányadosát 10:1 alatt kell tartani a jó vezérlési stabilitás érdekében, ideális esetben pedig 3:1 vagy ennél alacsonyabb értéket nagy dinamikus alkalmazások esetén.
2. lépés – Határozza meg mozgásprofilját
Vázolja fel a mozgási ciklus sebesség-idő grafikonját. Jegyezze fel a szükséges csúcssebességet, a gyorsítási és lassítási időket, valamint a munkaciklust (mennyi ideig működik a motor folyamatosan a pihenéssel szemben). Ez határozza meg mind a szükséges csúcsnyomatékot (gyorsítás közben), mind az RMS (root mean square) nyomatékot, amelynek a túlmelegedés elkerülése érdekében a motor névleges folyamatos nyomatéka alatt kell maradnia.
3. lépés – Válassza ki a motorvázat és a teljesítménybesorolást
Ha ismeri nyomaték- és fordulatszám-követelményeit, válasszon olyan motort, amelynek névleges nyomatéka és névleges fordulatszáma kényelmesen fedezi az Ön igényeit némi ráhagyással (általában 20–30%). Győződjön meg arról is, hogy a fizikai keret mérete illeszkedik-e a szerelési helyhez – a szervomotorok általában 40 mm-től 200 mm-ig vagy nagyobb karimaméretben kaphatók.
4. lépés – Illessze a szervohajtást
A szervohajtást a motor feszültségéhez, áramához és jeladótípusához kell igazítani. A legtöbb gyártó hozzáillő motorhajtású készleteket árul (például Yaskawa Sigma sorozat, Mitsubishi MR-J sorozat, Siemens S-1FK sorozat), ami leegyszerűsíti a beállítást. Ha márkákat kever, gondosan ellenőrizze a kompatibilitást a névleges feszültség, a kódoló protokoll (inkrementális, abszolút, EnDat, BiSS-C stb.) és a vezérlő interfész (impulzus/irány, analóg ±10 V, EtherCAT, PROFINET stb.) között.
5. lépés – Vegye figyelembe a környezeti feltételeket
Ellenőrizze a működési környezetet. Ha a motor hűtőfolyadéknak, pornak vagy lemosásnak van kitéve, akkor IP65 vagy IP67 besorolású motorra van szüksége. Ha szélsőséges hőmérsékleten fog működni, ellenőrizze a motor környezeti hőmérsékleti tartományát. Élelmiszer-, ital- vagy gyógyszeripari alkalmazásokhoz rozsdamentes acél tengelytömítésekre és speciális bevonatokra lehet szükség.
Bekötési és telepítési alapismeretek
A váltóáramú szervomotor megfelelő felszerelése ugyanolyan fontos, mint a megfelelő kiválasztása. Néhány kulcsfontosságú szempont, amelyet szem előtt kell tartani:
- Külön táp- és jelkábelek: A motor tápkábelét (U, V, W fázisok) mindig külön vezesse a jeladó visszacsatoló kábelétől. Ha ugyanabban a vezetékben futtatja őket, az interferenciát okozhat, amely destabilizálja a vezérlőhurkot.
- Használjon árnyékolt kábeleket: Mind a tápkábelt, mind a kódolókábelt árnyékolni kell, az árnyékolás egyik végén (általában a meghajtó végén) földelve kell lennie a zajfelvétel elkerülése érdekében.
- A motorház földelése: Az áramütés elkerülése és az EMI-kibocsátás csökkentése érdekében a motorházat a gépváz földeléséhez kell csatlakoztatni.
- Ellenőrizze a fázissorrendet: Az U, V, W csatlakozásoknak egyeznie kell a motor és a hajtás között. Ha a motor rossz irányba jár, cserélje fel bármelyik két fázisvezetéket – soha ne cserélje fel a jeladó vezetékeit az irány rögzítéséhez.
- Használjon dinamikus fékellenállást: Függőleges terhelést hajtó vagy gyors leállást igénylő motoroknál a hajtáshoz csatlakoztatott külső fékellenállás lassítás közben veszi fel a regeneratív energiát, és megakadályozza a túlfeszültségi hibákat.
Szervohajtás hangolása: A legjobb teljesítmény elérése
A bekötés után a szervohajtást be kell hangolni, hogy a vezérlőkör megfelelően reagáljon az adott motor-terhelés kombinációra. A legtöbb modern szervohajtás tartalmaz egy automatikus hangoló funkciót, amely egy tesztrutinon keresztül pörgeti a motort, és automatikusan kiszámítja az optimális erősítési beállításokat. Ez általában elég jó a szabványos alkalmazásokhoz.
Igényes alkalmazásokhoz – mint például a nagysebességű pick-and-place vagy precíziós köszörülés – a három fő PID-erősítés (pozícióerősítés, sebességerősítés és integrált erősítés) kézi hangolása szükséges lehet. Az erősítések növelésével a rendszer gyorsabban és merevebben reagál, de túl magas, és a rendszer instabillá válik és oszcillál. A cél a gyors reagálás elérése túllövés vagy vadászat nélkül.
A legtöbb meghajtó lehetővé teszi bevágásszűrők beállítását a mechanikai rezonanciafrekvenciák elnyomására, előrecsatolási erősítések beállítását a követési pontosság javítására gyorsítás közben, valamint súrlódáskompenzációt a pozícióhiba csökkentésére alacsony sebességeknél. Ha időt szán ezeknek a beállításoknak a megfelelő hangolására, ez jelentősen megváltoztathatja a gép végső pozicionálási pontosságát és teljesítményét.
Karbantartási és hibaelhárítási tippek
A váltóáramú szervomotorok általában nagyon megbízhatóak, mivel nincs bennük kefe vagy kommutátor, ami elhasználódna. Idővel azonban még szükség van némi karbantartásra:
- Csapágycsere: A motor csapágyai a leggyakoribb kopóelemek. A legtöbb gyártó az üzemórák alapján határozza meg a csapágycsere intervallumait – jellemzően 20 000-30 000 óránként. A túlzott vibráció vagy zaj a csapágykopás korai jele.
- Kódolókábel ellenőrzése: A kódolókábelek gyakran ismétlődően meghajlanak (különösen a robotkarokon vagy portálrendszereken), és idővel belső töréseket okozhatnak. Ha egy szervo hibás pozícióhibákat vagy hibákat kezd mutatni, először gyanakodjon a jeladó kábelére.
- Túlmelegedés ellenőrzése: Ha a motor felforrósodik, ellenőrizze, hogy a munkaciklus a specifikáción belül van-e, a környezeti hőmérséklet elfogadható-e, és hogy a motor felülete tiszta és nincs-e eltömődve. A tartós túlmelegedés rontja a tekercsszigetelést és lerövidíti a motor élettartamát.
- A meghajtó riasztási kódjai: Hiba esetén mindig olvassa le a riasztási kódot a szervohajtás kijelzőjéről vagy a szoftverről. A gyakori kódok közé tartozik a túlfeszültség, a túláram, a kódoló hiba, a túlterhelés és a pozícióeltérés túllépése. Mindegyik közvetlenül a kiváltó okra mutat rá.
A motor üzemóráiról, riasztási előzményeiről és bármilyen fizikai ellenőrzésről karbantartási napló vezetése nagyban hozzájárul a meghibásodások előrejelzéséhez, mielőtt azok nem tervezett leállást okoznának.
Előző bejegyzés
Nincs korábbi cikk
Következő bejegyzés
A közepes feszültségű frekvenciaváltó magyarázata: hogyan működik, melyik topológiát válasszuk, és mit kell megadni
Szerzői jog 2024 Fujian Raynen Technology Co., Ltd. Minden jog fenntartva.
Adatvédelmi szabályzat  Motorvezérlő gyártók
Motorvezérlő gyártók